معرفی برنامه پایداری الکترونیکی (ESP)
قابلیت فرمان پذیری و پایداری هر خودروئی بر اساس شرایط رانندگی ، وضعیت جاده و نیز میزان چسبندگی تایرهـا بـه سطح جاده متفاوت می باشد .
در سیستم ترمزESP (Electronic Stability Program) در صورت نیاز بر اساس موقعیتهـای فوق الذکر ، رفتار خودرو با انجام عمل ترمزگیری مستقل بر روی چرخها متعادل مـی گـردد و خـودرو را در جـاده پایـدار نگـه می دارد. این پایداری تا زمانی ادامه می یابد که نیروی جانبی ایجاد شده توسط تایر جهت بقـای آن حـین عمـل دور زدن ، کـافی باشد در غیر این صورت دو حالت Understeering و Oversteeringپدید می آید که به شرح زیر می باشند :
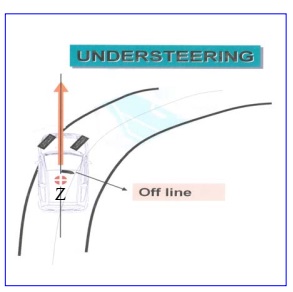
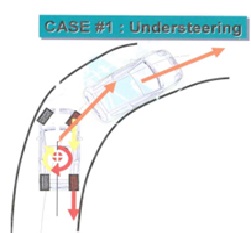
: Understeering function
عمل مذکور که باعث از دست رفتن پایداری خودرو می شود ، در موارد زیر حادث می گردد :
1- کاهش شدید چسبندگی بین تایرهای جلو و سطح جاده.
2- در حالت فرمان دادن بیش از حد خودرو ( در برخی موارد)
3- در حالت شتاب زیاد خودرو حین دور زدن ( در برخی موارد)
در ایـن مرحلــه سـرعت خــودرو حــول محـور (Yaw Speed) Zکــافی نمی باشد.
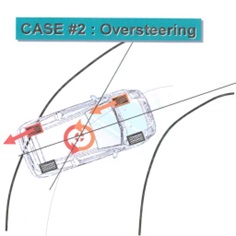
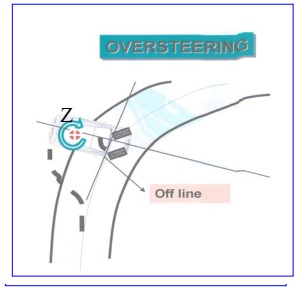
: Oversteering function
عمل مذکور که باعث از دست رفتن پایداری خودرو می شود ، در موارد زیر حادث می گردد :
1- کاهش شدید چسبندگی بین تایرهای عقب و سطح جاده به جهت متعادل نگه داشتن خودرو در مسیر جاده.
2- در حالت شتاب منفی ناگهانی ( رها کردن ناگهانی پدال گاز) در برخی موارد
3- در حالت شتاب زیاد خودرو حین دور زدن. (در برخی موارد در خودروهای دیفرانسیل عقب )
در این مرحله سرعت خودرو حول محور (Yaw Speed) Zبیش از حد زیاد است .
کنترلUndersteering function :
مرحله 1 : ترمزگیری چرخ داخلی عقب.
مرحله 2 : ترمزگیری چرخ داخلی جلو.
مرحله 3 : تنظیم دریچه گاز ( در صورت نیاز)
کنترل Oversteering function :
مرحله 1 : ترمزگیری چرخ بیرونی عقب.
مرحله :2ترمزگیری چرخ بیرونی جلو.
مرحله 3 : تنظیم دریچه گاز ( در صورت نیاز )